“强黏附、易脱附”是仿生黏附技术在工程应用中的基本力学需求,特别是黏脱附切换的便捷性、经济性与可靠性,直接影响着界面操控自动化的实现程度。壁虎、苍蝇、蜘蛛等生物依靠足底刚毛结构的角度控制,拥有了攀岩走壁的全空间运动能力,近年来国内外学者借以热、光、电、磁以及类壁虎角度等方式实现了仿生黏附-脱附控制,甚至展现出了足以媲美生物黏脱附控制的能力,为仿生黏附技术的工程应用奠定了基础。
为了进一步提升仿生黏附技术的应用便捷性与经济性,南京航空航天大学姬科举课题组提出了一种压力诱导的可控黏附-脱附技术,通过仿生黏附结构的微观设计,可以仅仅依赖法向压力控制,实现界面的黏附与脱附,极大地简化了界面操控实现的路径和方式。
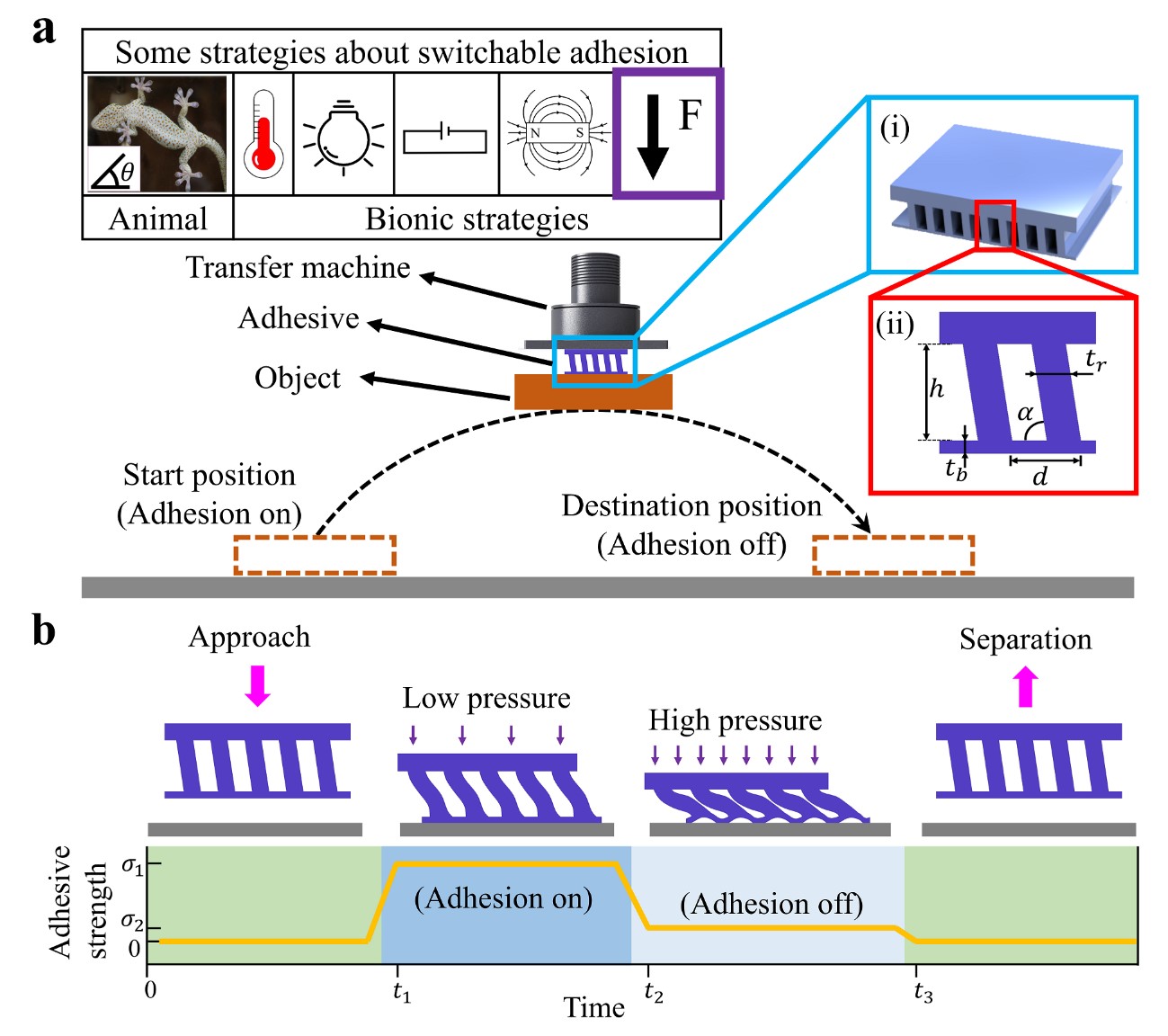
图1 仿生黏附材料的作用机理
论文介绍了一种由背衬层、中间层与底层组成的多层级仿生黏附材料,其特征是具有倾斜阵列的三明治夹层结构。当仿生黏附材料承受较低的压力时,中间层的四边形阵列发生小变形,底层薄膜与接触面间的接触未被干涉,界面接触良好,实现黏附。当黏附材料承受的法向压力超过一定的阈值时,中间层的四边形棱柱阵列发生大变形,并带动底层薄膜发生屈曲,此时底层与基底之间的良好接触状态被破坏,实现脱附。通过控制法向压力,黏附材料能够实现从“低预压黏附”到“高预压黏附”的切换。
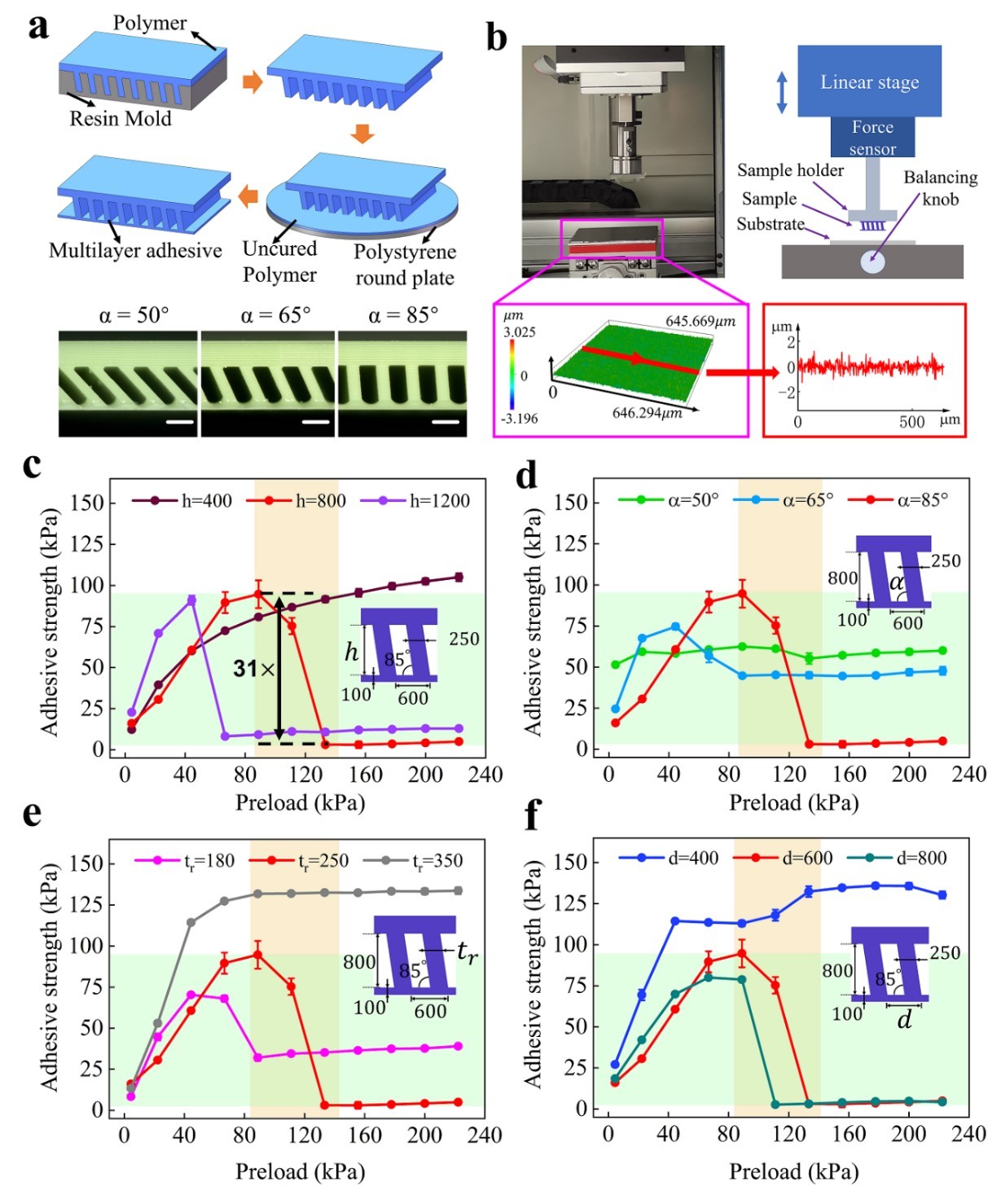
图2 仿生黏附材料的制备及其黏附性能
仿生黏附材料的结构参数对其在压力诱导下的黏附-脱附行为具有关键影响。通过量化倾斜阵列角度、间隔、厚度等参数,可以获得预压力与黏附力之间的诱导关系,为预压力诱导的黏脱附行为提供了基础。
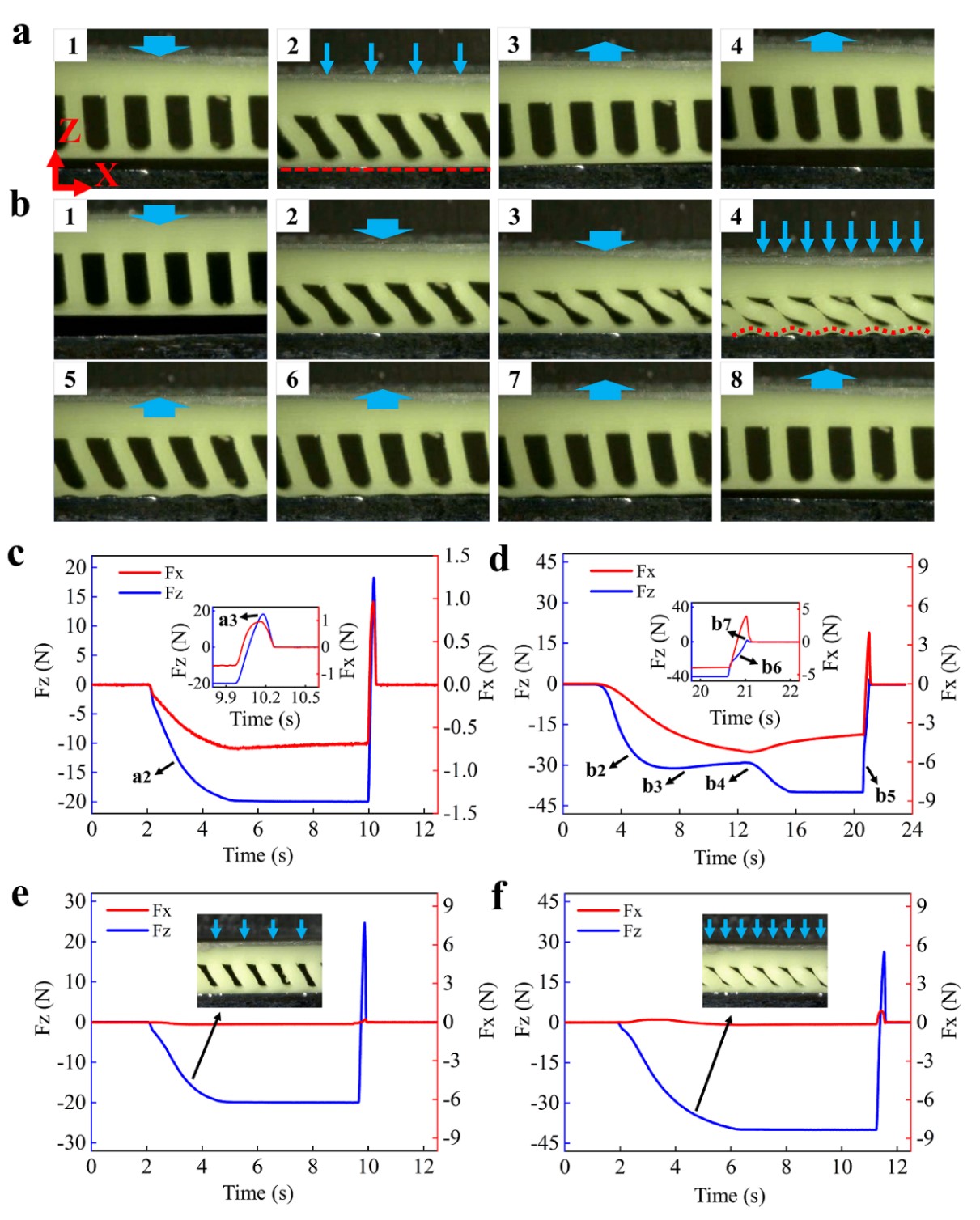
图3 仿生黏附材料在低压力和高压力下的界面接触与自身微结构变形过程
仿生黏附材料在低压力和高压力的作用下的变形过程显示:低压力下,黏附材料的底面与接触面始终保持良好的接触;在高压力下,黏附材料中间层发生大变形导致了底面的屈曲,且在力卸载的过程中,弹性体应变的迟滞造成仿生黏附材料底面与基底的接触并没有恢复如初,进而完成界面的脱附行为。
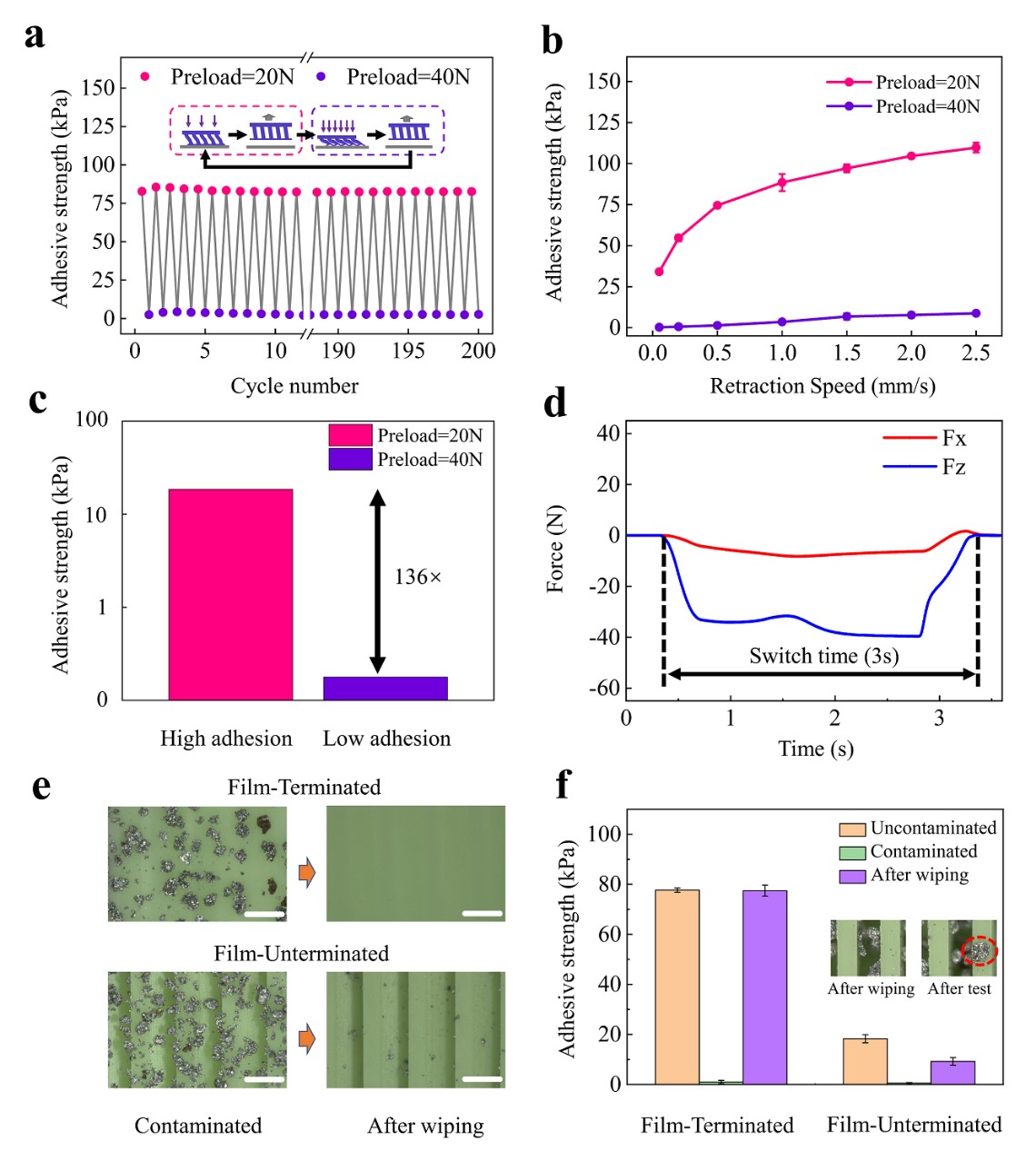
图4 仿生黏附材料的力学影响因素与使役特性分析
通过优化仿生黏附材料的结构参数,可以在不同的预压力和拉脱速度下获得较高的开关比(最大136倍的黏附力差异空间),且具有较短的切换时间(≤3 s)。此外,仿生黏附材料平面的末端在易清洁和可重复等方面也表现出了较好的特性。
相关研究成果以“Preload-Induced Switchable Adhesion”为题发表在Small(DOI:10.1002/smll.202305091)上。论文第一作者为南京航空航天大学机电学院硕士研究生涂冲文,论文通讯作者为姬科举副研究员,南京航空航天大学为第一完成单位。本研究工作得到了国家自然科学基金(52075249)、江苏省仿生功能材料重点实验室基金等项目的资助。




 关注我们
关注我们
